 微信公众号
微信公众号
微信扫一扫

视频丨极限训练+技术迭代 揭秘机器人如何备战半马
目前多数比赛队伍都已经准备就绪,21公里的半程马拉松最考验机器人的就是耐力与稳定性,如何让机器人在复杂地形中跑得既快又稳?各赛队是如何训练机器人的?跟随记者到山东的一家机器人研发企业一探究竟。

山东的优宝特1机器人正在备战2026人形机器人半程马拉松,它经过了两次更新迭代。
这款机器人去年参加世界人形机器人运动会1500米项目时,意外摔断了手臂,但还是坚持完成了比赛,一度成为当时关注的焦点。而今年这款机器人即将参加21公里马拉松比赛,这对机器人的耐力和稳定性有着更大挑战。据工作人员介绍,目前这款机器人正在进行极限测试,进一步提高它的速度和稳定性。

山东优宝特智能机器人有限公司算法工程师 卢娜:目前,每天有不同的机器人去室外跑道测试,根据它记录的数据再去完善算法、优化运动性能,每天都是在适配不同的算法和硬件升级。
记者在探访中发现,这款机器人相较去年参加世界人形机器人运动会1500米项目时,性能有了明显提升。
为了提高在比赛过程中的抗干扰能力,研发团队今年对它进行了专门训练,它需要在半秒的时间内快速完成识别、分析和动态调整,来调动各关节协调作用,保持身体平衡。

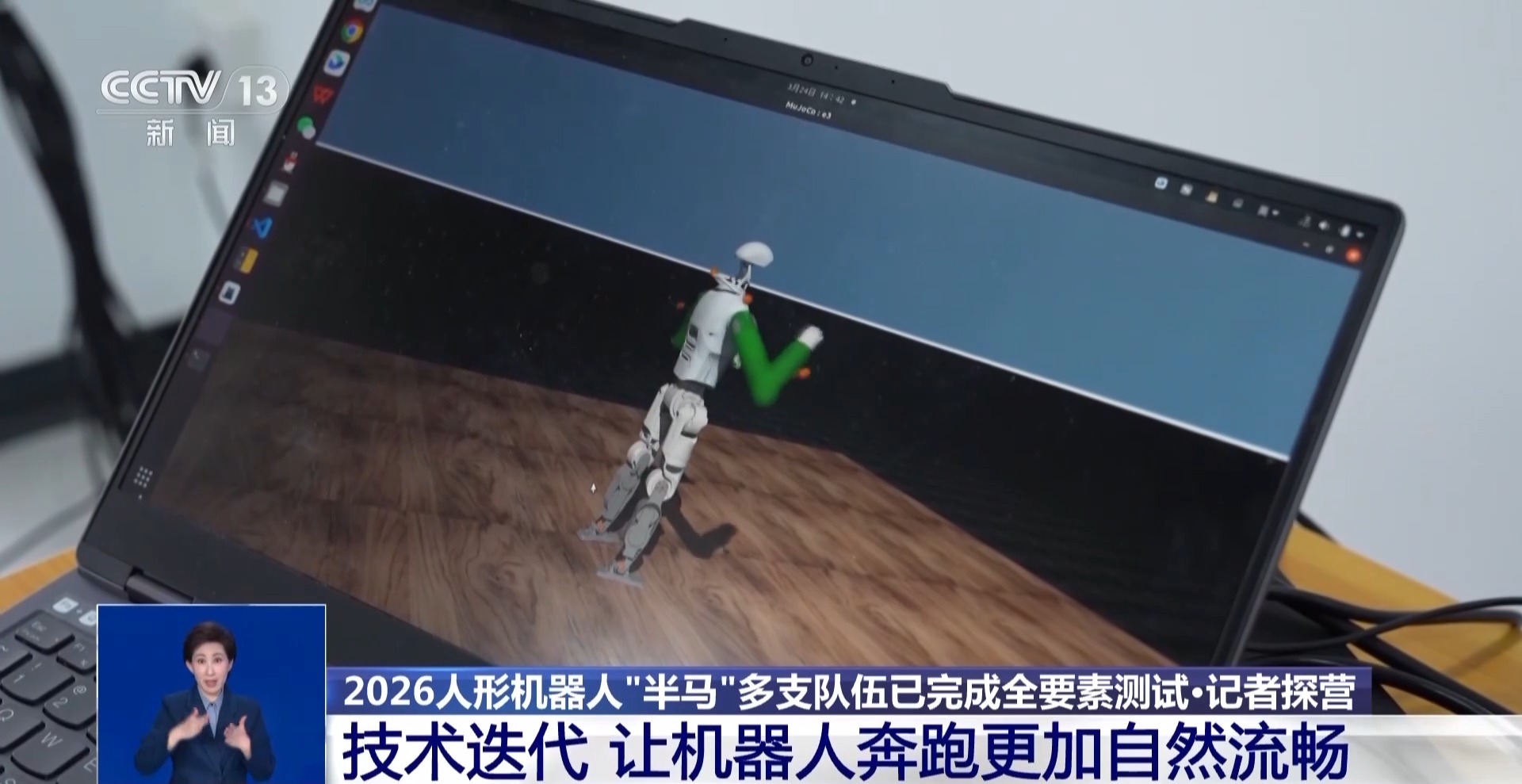
经过了一年的技术迭代,今年的这款机器人虽然在外观上没有太大改动,但是跑步的姿态却跟去年相比有了明显不同,尤其路过转弯和上下坡时,大小臂的摆动以及膝盖弯曲的姿态非常自然,脚步切换丝滑,脚掌落地轻盈,已经没有了去年的顿挫感,这就得益于日复一日的训练。

山东优宝特智能机器人有限公司副总经理 周彤:采集了运动爱好者的跑步姿态 ,然后通过工程师的数据优化和测试,再加上近百小时的仿真环境模拟训练,呈现了现在拟人化非常高的姿态,跑步的姿态更协调。
此外,这支参赛队伍还报名了自主导航组比赛,也就是在起跑后,机器人需要自主完成全场比赛。这需要机器人实时感知周围环境,对赛场信息进行随机应变,并预判其他机器人以及随行人员车辆的路线冲突,及时避障。
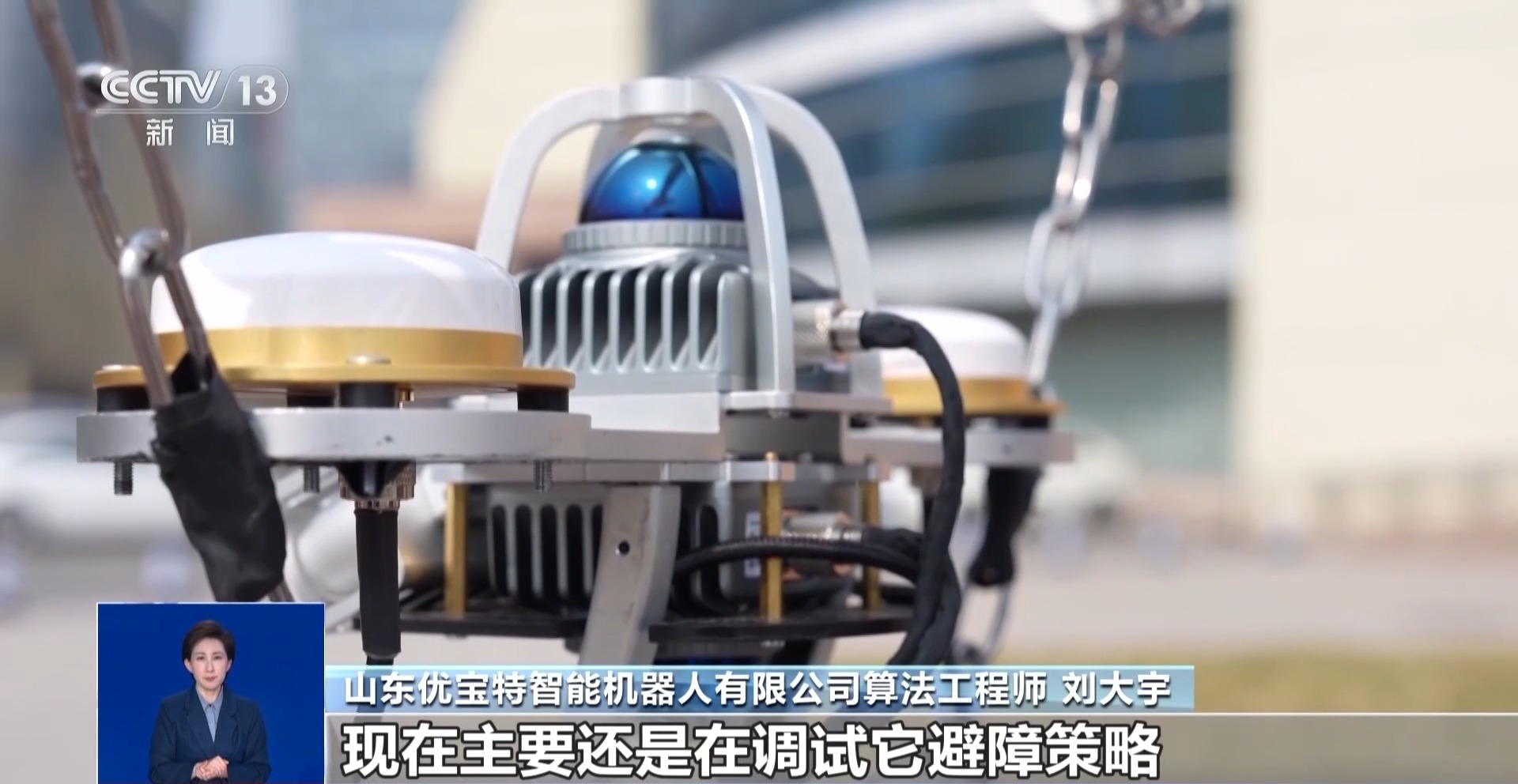
山东优宝特智能机器人有限公司算法工程师 刘大宇:主要增加了激光雷达,包括RTK定位数据,包括摄像头,相当于眼睛、耳朵,现在主要还是调试它的避障策略,在保证高速的前提下,又能让它及时识别到障碍。

-
下一条:习近平会见西班牙首相桑切斯
0条评论
德州晚报新闻热线
0534-2220000工作时间 周一至周五 8:00-17:30
客服QQ
微信公众号

微信客服号

Copyright @ 2011-2026 德州晚报社 All Right Reserved
联系电话:0534-2220077